
 mxene 学术专题
mxene 学术专题
基于碳纳米管和Ti3C2Tx MXene的高性能泡沫应变传感器
QQ学术交流群:1092348845
详细介绍
研究背景
柔性应变传感器在可穿戴电子产品中具有重要意义,因为它可以监测来自人体的物理信号。为了满足实际应用的需求,这些应变传感器需要具有高灵敏度、宽工作范围和对人体皮肤具有附着性。在各种应变传感器中,泡沫状传感器不仅可以检测拉伸应变,还可以检测压缩应变和扭转应变。此外,因其还具有透气性、重量轻、高柔性和高拉伸性而受到广泛关注。虽然泡沫应变传感器的灵敏度和传感范围已经通过多种策略得到提高,但开发同时具有更宽工作范围和更高灵敏度的高性能可穿戴应变传感器,目前仍然存在巨大挑战。全文导读
为了解决上述问题,南京工业大学黄维院士团队通过将MXene纳米片吸附到由盐模板法制备的多壁碳纳米管(MWCNT)和热塑性聚氨酯(TPU)复合泡沫的表面,制备得到一种轻质且灵敏的高性能应变传感器。TPU/MWCNTs@MXene传感器可以提供~100%的宽工作应变范围和高达363的出色灵敏度,优于最先进的泡沫型应变传感器。此外,复合泡沫表现出优异的透气性和接近皮肤的合适弹性模量,表明其作为可穿戴传感器具有高度的舒适性。由于这些优点,传感器可以有效地检测细微/大的人体运动,例如关节运动、手指运动和声带振动等。此外,该传感器还可用于手势识别,表明其在人机交互中的应用前景。相关论文成果以“High-Performance Foam-Shaped Strain Sensor Based on Carbon Nanotubes and Ti3C2Tx MXene for the Monitoring of Human Activities”为题于2021年6月4日发表在ACS NANO上。
导读如下:
1、TPU/MWCNTs@MXene泡沫应变传感器的制备
TPU/MWCNTs@MXene泡沫应变传感器是通过简单的盐模板和浸涂方法制备的(图1)。首先将MWCNTs和TPU的混合,然后加入盐颗粒作为模板形成多孔结构。在水中去除盐模板后,得到导电TPU/MWCNTs泡沫,最后将其浸泡在MXene悬浮液中得到最终产物。由于填充了导电MXene片材,进一步提高了泡沫的导电性。当这种TPU/MWCNTs@MXene泡沫被拉伸时,由于导电材料之间的分离和滑动导致泡沫的导电性降低。因此,这种 TPU/MWCNTs@MXene泡沫可用作应变传感器。
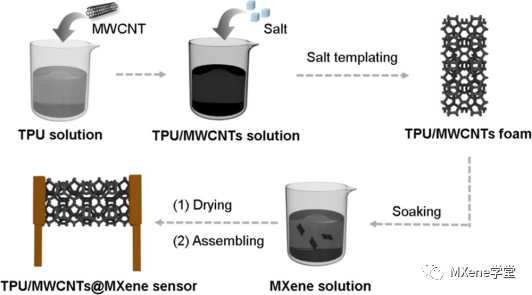
图1: TPU/MWCNTs@MXene泡沫应变传感器的制备流程图。
2、TPU/MWCNTs@MXene泡沫应变传感器的性能
从TPU/MWCNTs@MXene泡沫的XRD谱图(图2a)中可以明显看到MXene的所有衍射峰都存在于TPU/MWCNTs@MXene泡沫中。在FTIR光谱中,可以清楚地识别出TPU的特征吸收峰(图2b)。在拉曼光谱中,位于255.4,453.0和621.9 cm-1处的峰对应于Ti3C2F2的A1g、Eg振动以及Ti3C2(OH)2的振动,表明了MXene的存在。此外,MWCNTs的D波段(1372.8 cm-1)和G波段(1600.7 cm-1)也出现在拉曼光谱中(图2c,d)。TPU/MWCNTs@MXene泡沫的SEM图像也表明MXene片材成功地附着在TPU/MWCNTs泡沫中(图2e-g)。且随着浸泡时间的增加,将会有更多的MXene片被吸附。
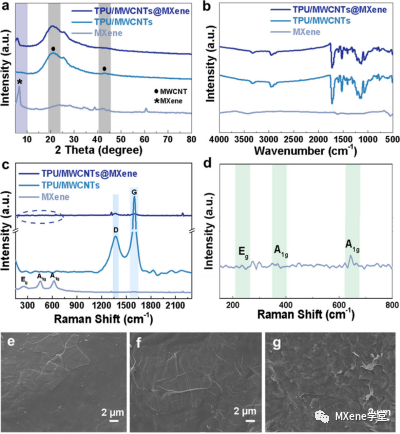
图2:TPU/MWCNTs@MXene、TPU/MWCNTs和MXene的(a)XRD、(b)FTIR和(c)拉曼光谱。(d)局部放大区域的拉曼光谱。不同浸泡时间(e)10、(f)30和(g)50分钟制备的TPU/MWCNTs@MXene泡沫的SEM图。
TPU/MWCNTs@MXene泡沫具有高度的柔韧性和可拉伸性,重量轻且易于加工。与纯TPU泡沫相比,TPU/MWCNTs和TPU/MWCNTs@MXene泡沫具有更高的弹性模量和拉伸断裂强度(图3a)。TPU/MWCNTs@MXene泡沫的杨氏模量为140 kPa,接近皮肤的杨氏模量(25-220 kPa),表明该泡沫作为人体皮肤上的可穿戴设备具有很高的舒适度。通过将泡沫放在叶子上,表明其具有极轻的重量(图3b)。泡沫也可以很容易地切割成各种形状,如心形、星形、三角形和花形(图3c)。此外,TPU/MWCNTs@MXene泡沫还可以弯曲、扭曲或打结而不会损坏(图3d)。
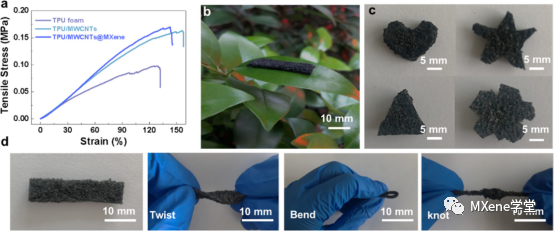
图3:TPU/MWCNTs@MXene泡沫的机械性能和柔韧性。(a)三种泡沫的应力-应变曲线。(b)TPU/MWCNTs@MXene的轻质性。(c)不同形状的导电TPU/MWCNTs@MXene泡沫。(d)TPU/MWCNTs@MXene泡沫的扭曲、弯曲和打结。
由于内部存在多孔结构,本材料泡沫具有高透气性。泡沫的渗透性由水蒸气透过率(WVTR)确定,水通过泡沫蒸发的速度表明它们的透气性(图4a)。显然,由于泡沫中的多孔结构,TPU/MWCNTs和TPU/MWCNTs@MXene泡沫的WVTR远高于TPU和TPU/MWCNTs薄膜(4b)TPU/MWCNTs@MXene泡沫具有与人体皮肤接近的WVTR值,因此在使用时人体的皮肤可以正常呼吸,减少了对皮肤刺激的可能性。
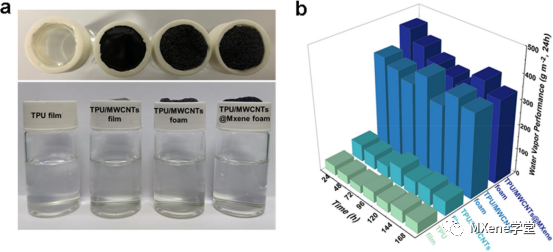
图4:TPU/MWCNTs@MXene泡沫的透气性。(a)用于测量TPU薄膜、TPU/MWCNTs薄膜、TPU/MWCNTs泡沫和TPU/MWCNTs@MXene泡沫透气性的装置照片。(b)不同样品在不同时间的气体渗透率比较。
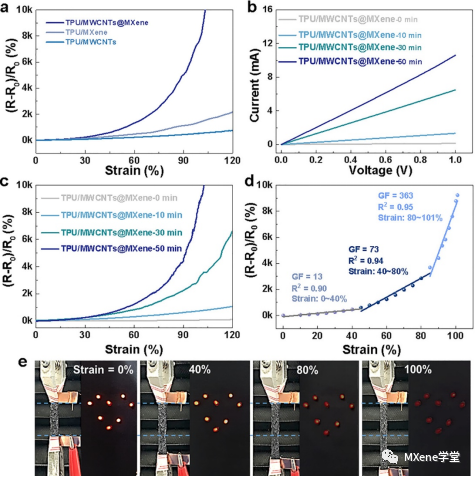 图5: TPU/MWCNTs@MXene泡沫作为应变传感器的性能。
图5: TPU/MWCNTs@MXene泡沫作为应变传感器的性能。
TPU/MWCNTs@MXene泡沫传感器表现出优异的性能。在10%、20%和50%的应变下,传感器表现出稳定的响应(图6a)。这些结果表明,该传感器可用于检测具有高重复性的各种应变。当最大应变控制在10%时,传感器能够在0.1-2 Hz的频率下显示出稳定的循环性能(图6b)。并且在5%至15%的应变下显示出高的循环稳定性(图6c)。此外,该传感器具有优异的长期循环稳定性。在200次循环/2000秒后几乎观察不到传感器的相对电阻变化(图6d)。
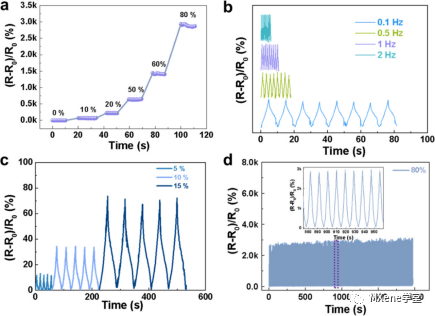 图6: TPU/MWCNTs@MXene泡沫应变传感器的性能。
图6: TPU/MWCNTs@MXene泡沫应变传感器的性能。
通过扫描电镜检测了TPU/MWCNTs@MXene泡沫在拉伸应变从0%到100%的情况下的形态变化来研究传感机制(图8)。实验结果表明,TPU/MWCNTs@MXene泡沫应变传感器的高性能归因于嵌入在TPU泡沫中的互相连接的MWCNT渗透网络和吸附在网络上的易变形的MXene片的协同效应。在较小的拉伸应变下,孔径变大,电阻的增加主要归因于MXene片的变形和滑动。在较大的拉伸应变下,孔隙变大,材料表面出现许多裂纹;因此,MWCNTs网络会发生较大的变形,导致传感器电阻的迅速增加。当拉伸应变非常大时,MXene片和MWCNT网络都会发生显著变形,导致电阻急剧增加。
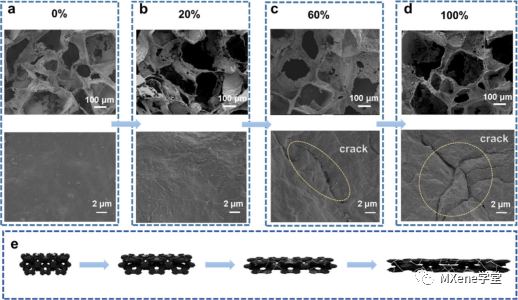
图7 不同应变下TPU/MWCNTs@MXene泡沫的SEM图像和示意图。(a-d)泡沫在0%、20%、60%和100%应变下的SEM图像。上层图像是下层图像的放大。(e)拉伸过程中导电网络的演变示意图。
图8进一步展示了TPU/MWCNTs@MXene泡沫应变传感器在手势检测中的应用。五个独立的传感器连接到手套的五个手指部分,以检测人类手指的弯曲和倾斜。在前5秒内,所有手指都完全伸直,因此阻力没有显著变化。然后,食指、中指和无名指蜷缩起来,导致相应传感器的电阻迅速增加。随后,其他手势出现,所有附着在蜷缩手指上的传感器都显示出电阻增加。当所有五个手指再次伸直时,五个传感器的电阻恢复,证明了传感器的可重复性。因此,该传感器可用于检测手指的手势,这在手语翻译、手势控制机器人技术和其他虚拟现实应用中具有巨大潜力。
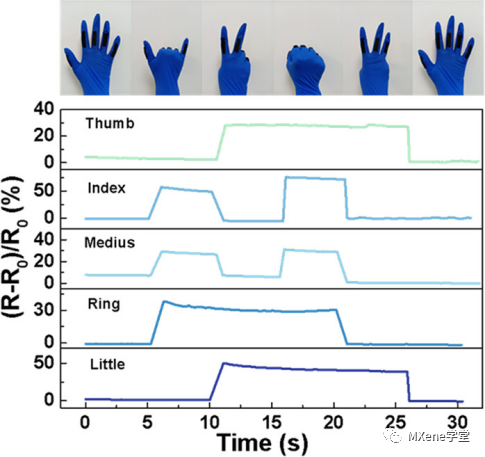
图8 TPU/MWCNTs@MXene泡沫应变传感器在手势识别中的应用。
文章结论
作者通过一种简单且具有成本效益的方法制备得到TPU/MWCNTs@MXene泡沫,并成功地用作应变传感器。应变传感器具有高达363的GF值和高达100%的工作应变范围。此外,应变传感器反复应力循环下也表现出优异的循环稳定性。同时作者还展示了应变传感器在监测人体运动中的应用,例如手指弯曲、肩弯曲、膝盖弯曲、张嘴和喉咙振动等。此外,轻质泡沫具有接近皮肤的透气性,证明了泡沫在可穿戴电子产品中的巨大潜力。本信息源自互联网仅供学术交流 如有侵权请联系我们立即删除
- 上一款: 综述-耐用高速锂离子电池用复合隔膜
- 下一款: Bioactive Materials |