

High-precision sensors are the basic components of the emerging soft exoskeleton, which provide real-time electronic feedback for complex robot driving. Piezoresistive strain sensors are one of the basic necessities of closed-loop control. The multi-degree-of-freedom (DOF) characteristic of the soft exoskeleton poses several new challenges to the required strain sensor. First, because the soft and elastic valve body can achieve large reversible deformation (usually when the strain is greater than 100%), strain sensors suitable for soft exoskeleton need to provide accurate and reliable signals under high working strains. Secondly, with the improvement of high strain sensitivity, the linearity of the sensing signal is very high, which allows easy calibration to distinguish the different driving states of the soft exoskeleton. Third, the multi-degree-of-freedom motion of the soft exoskeleton further requires sensing equipment that can monitor multi-modal motion in multiple separate strain ranges. Therefore, in order to meet the application of soft exoskeleton, it is necessary to further develop specific design strategies for piezoresistive sensors.
Recently, Professor Po-Yen Chen from the National University of Singapore published a research paper titled: Wireless Ti3C2Tx MXene Strain Sensor with Ultrahigh Sensitivity and Designated Working Windows for Soft Exoskeletons in the internationally renowned academic journal ACS Nano. In this work, he passed The development of a wireless MXene sensor system that supports NFC solves the challenge of monitoring the multi-mode and multi-segment motion of the soft exoskeleton. The system has ultra-high sensitivity, high linearity sensor data, and an adjustable working window with user-specified options. First, in order to adjust the working window of the MXene sensor to meet the driving strain of the soft exoskeleton, a layered morphology was developed on the piezoresistive MXene layer using interface instability, in which the propagation of cracks in the plane was systematically controlled. By engineering the microstructure of the piezoresistive layer, the working window of the final MXene sensor can be adjusted from 130% to> 900% without sacrificing its high sensitivity (sensing coefficient (GF)> 800) and data linearity Degree (coefficient of determination (R2) ≈ 0.96). Next, by connecting the MXene sensor with the adjusting resistor, the assembled strain sensing module shows ultra-high sensitivity (GF≥14000) and reliable data linearity (R2≈0.99) in multiple working windows within the strain range specified by the user. ). In addition, the multi-sensor module can monitor multiple robot movements through a single database channel, which greatly reduces the load of real-time sensor data processing. Finally, integrate the MXene sensor module with NFC technology to establish a wireless battery-free sensor system to monitor the complex movements of various soft exoskeletons to assist hand/leg rehabilitation.
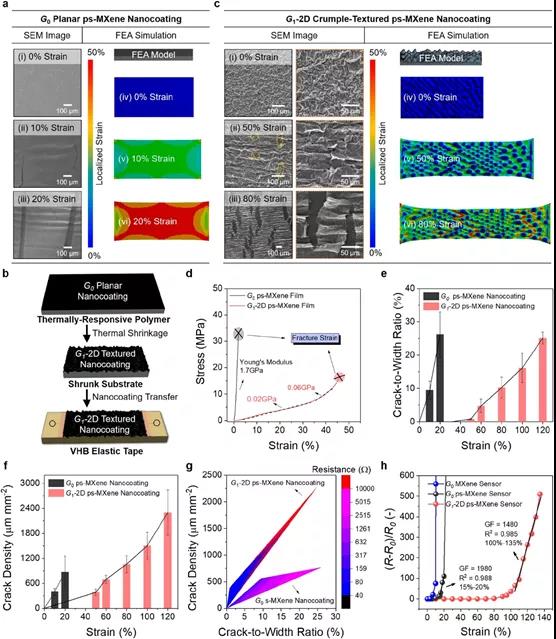
Figure 1. The management of crack propagation by engineering microstructure of piezoresistive layer.

Figure 2. Multilayer ps-MXene nano-coated strain sensor with high sensitivity and high strain linear working window.
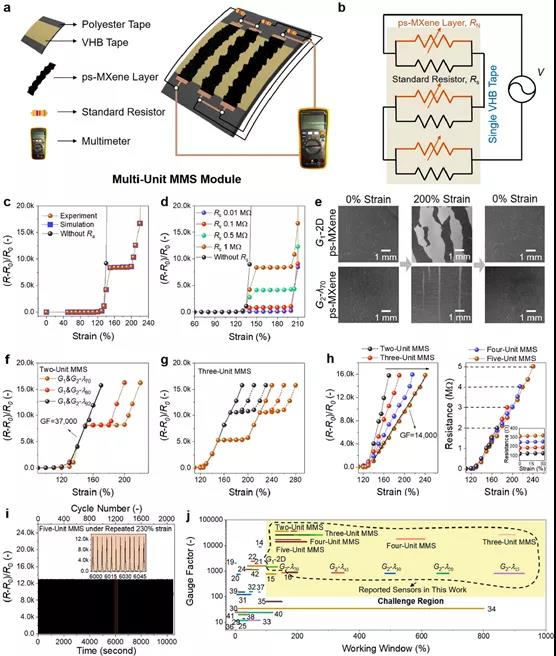
Figure 3. MMS module with multiple high GF linear working windows.
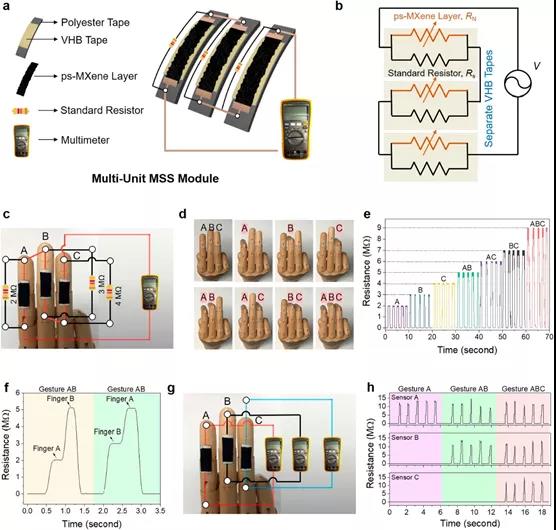
Figure 4. The MSS module is used to collectively monitor the actions of multiple robots.
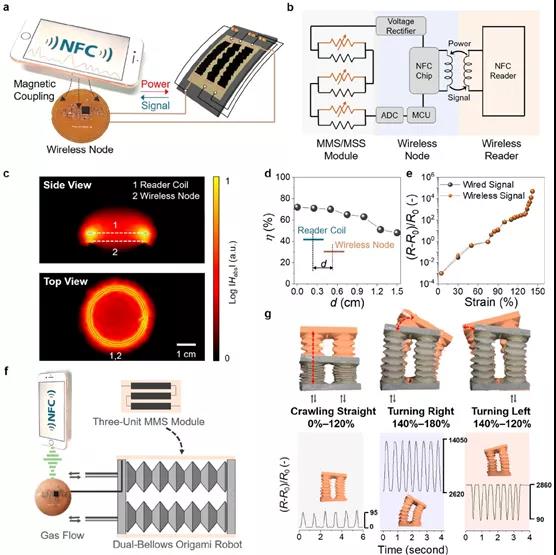
Figure 5. A wireless sensor system supported by NFC is used to monitor the actions of a multi-mode robot.
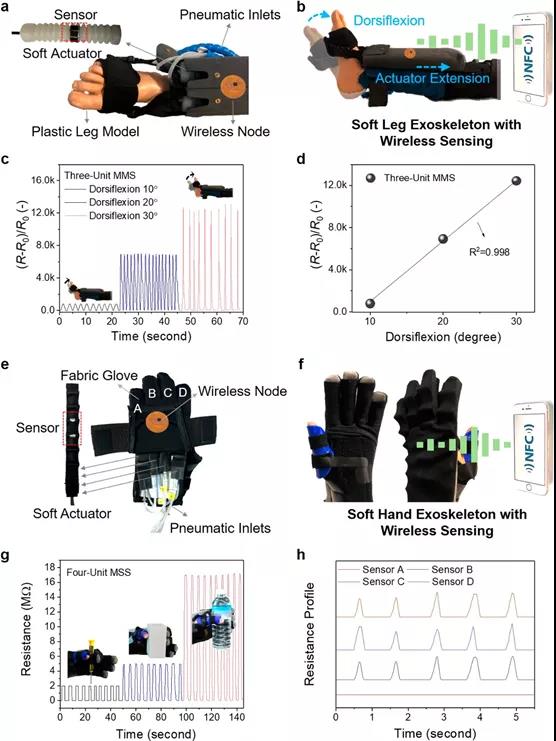
Figure 6. Wireless MMS and MSS sensing system as a soft exoskeleton battery-free electronic skin.
In summary, this article has developed several general strategies to manage the propagation of in-plane cracks on the piezoresistor ps-MXene layer, which are used to make an NFC wireless sensor system with ultra-high sensitivity and a specified working window for various soft Sexual exoskeleton. First, using the instability of the interface during the shrinkage of the continuous substrate, the layered ps-MXene topology is constructed on the piezoresistive layer, so that the fabricated strain sensor has high sensitivity (GF> 800) and an adjustable linear working window (from 130% to 900%). In addition, by assembling the voltage regulating resistor and NFC technology with the developed ps-MXene sensor, a wireless batteryless MMS and MSS sensing system was developed to monitor the actions of the multi-channel soft exoskeleton. The wireless MMS sensing system can sense the multi-modal drive of the soft exoskeleton within the working window specified by the user, with ultra-high sensitivity (GF ≥14000) and good data linearity (R2> 0.95). The resistance signal is wirelessly transmitted through the smartphone Transmission and reception. The wireless MSS sensing system further realizes a more convenient way to centrally monitor the multi-segment actions of the robot through the wireless transmission of a single database.
Literature link:
https://dx.doi.org/10.1021/acsnano.0c04730.
Information source: MXene Frontie
This information is sourced from the Internet for academic exchange only. If there is any infringement, please contact us to delete it immediately



