
咨询热线:
17715390137
18101240246
18914047343
邮件:mxenes@163.com
扫码关注或微信搜索公众号:
二维材料Fronrier
关注后点击右下角联系我们,
进入企业微信。
专业服务在线


在突触器件中次序/叠加多模态调制是实现复杂神经行为和活动的基础之一,而这仍然是传统人工突触面临的重大挑战。在人工突触中耦合摩擦电势调制和光子敏化可能会提供一种主动且直接的方式来利用突触可塑性和实现多模态神经形态计算。
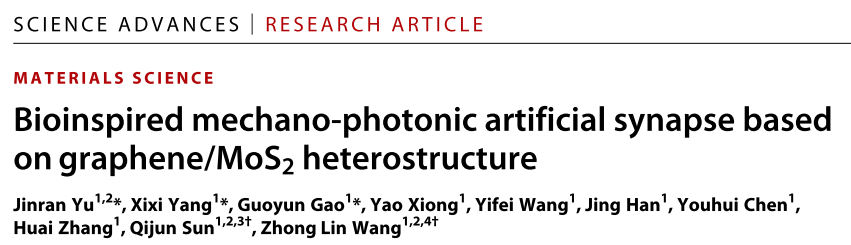
中科院纳米能源与系统所的孙其君和王中林课题组报道了一种基于石墨烯/二硫化钼(Gr/MoS2) 异质结构的机械-光子人工突触,具有协同的机械和光学可塑性(即机械位移辅助光电突触可塑性)。突触设备包括基于Gr / MoS2异质结构的光电晶体管和处于接触分离模式的集成TENG。TENG位移产生的摩擦电势可有效驱动突触晶体管。通过控制Gr和MoS2之间的电荷转移/交换,摩擦电势还可以很容易地调节光电突触行为。在机械位移(作为状态参数)和包含时空信息(如强度和光照时间)光脉冲的协同作用下,研究了包括长期记忆和神经易化在内的光子突触可塑性。在机械光子人工突触中也容易实现光子编程和机械擦除过程。除了对突触功能进行设备级仿真之外,还进一步构建了人工神经网络(ANN),以证明借助机械增塑作用改进图像识别的可行性。
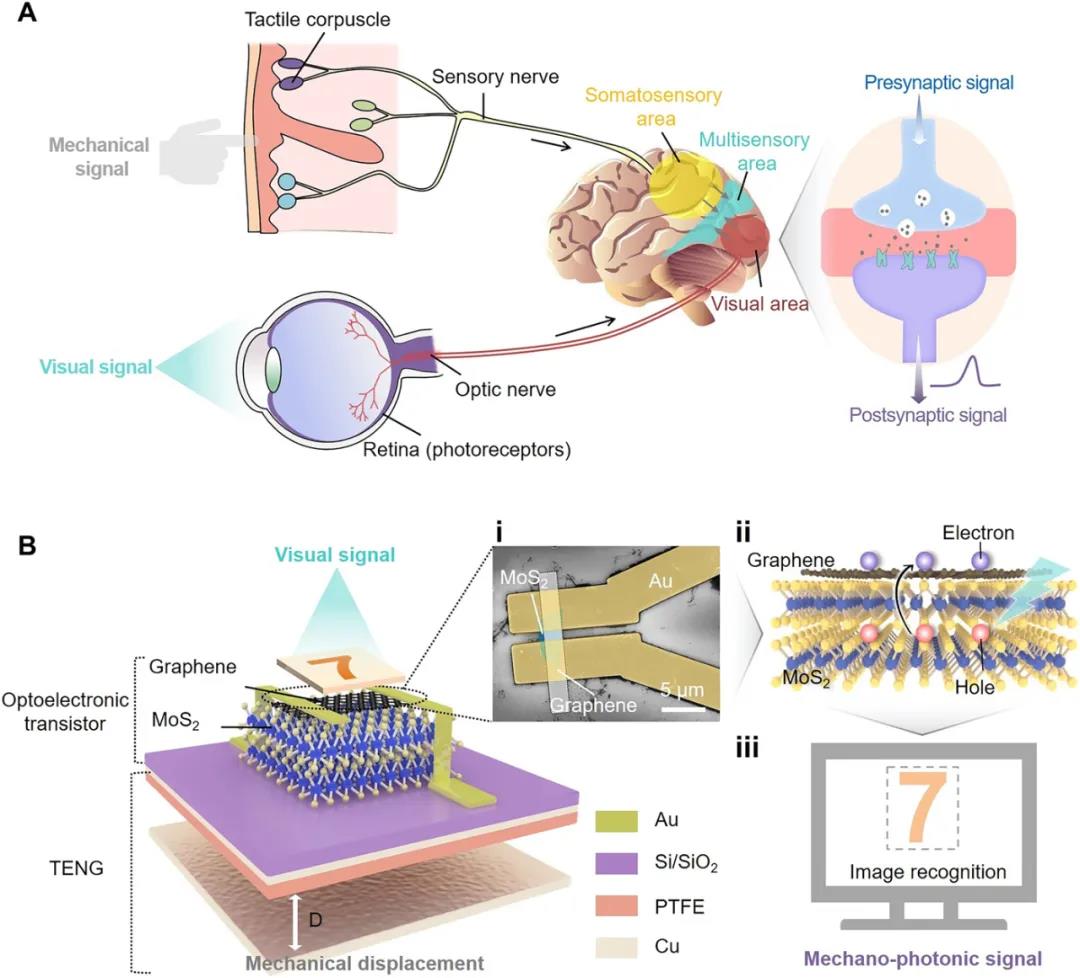
图1. 生物触觉/视觉神经和机械-光子人工突触:(A) 生物触觉/视觉感知系统示意图;(B) 器件示意图。
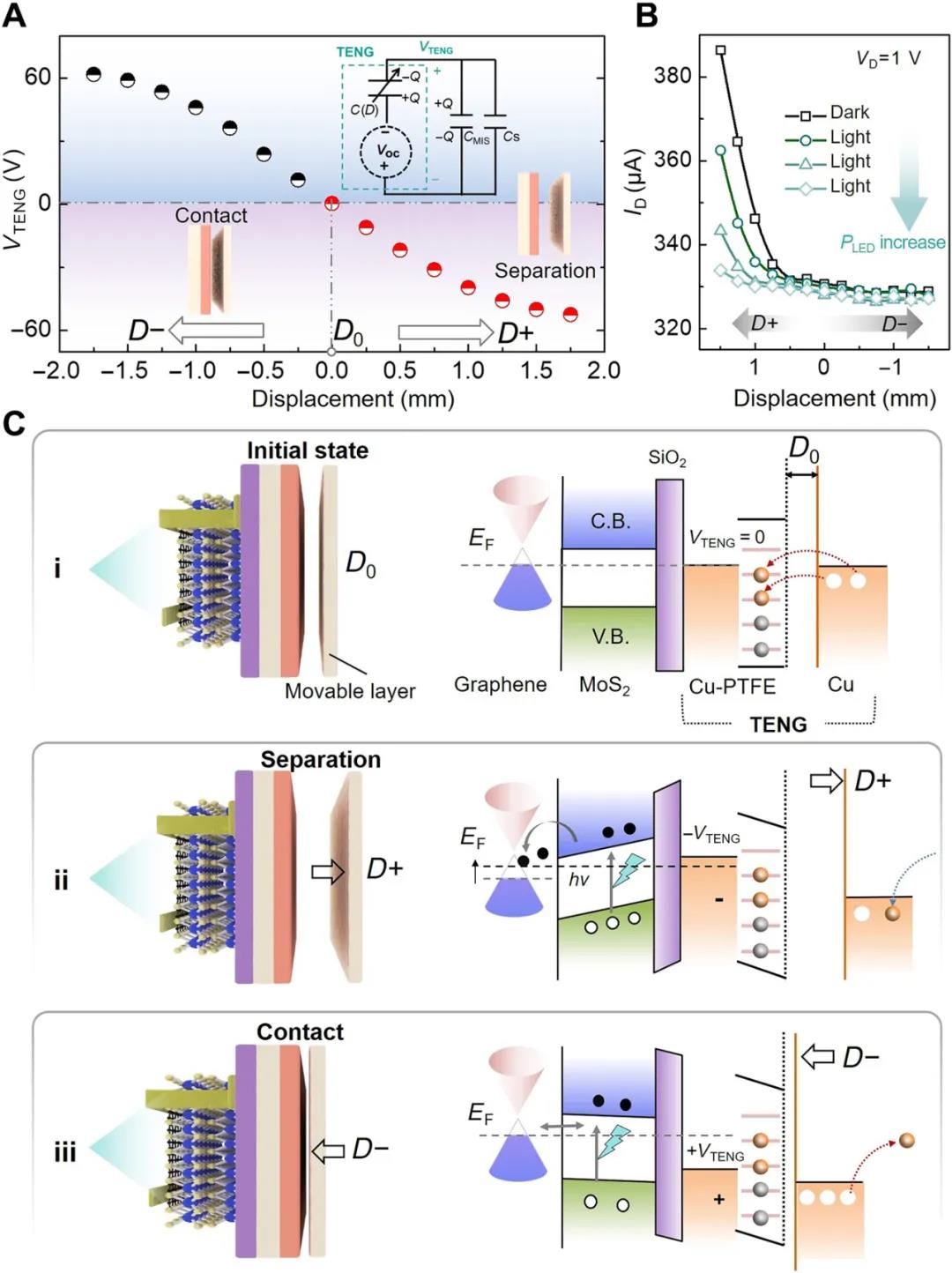
图2. 基于Gr/MoS2异质结构的机械-光电晶体管及其工作机制:(A) TENG输出电压和位移的关系;(B)传输曲线;(C) 工作机制
 图3. 基于Gr/MoS2异质结构的机械-光子人工突触:(A) 在黑暗下的实时突触后电流;(B) 光激活突触后电流;(C) 在光照和不同位移协同作用下的突触后电流变化;(D) 异质结构的态密度和载流子分布
图3. 基于Gr/MoS2异质结构的机械-光子人工突触:(A) 在黑暗下的实时突触后电流;(B) 光激活突触后电流;(C) 在光照和不同位移协同作用下的突触后电流变化;(D) 异质结构的态密度和载流子分布
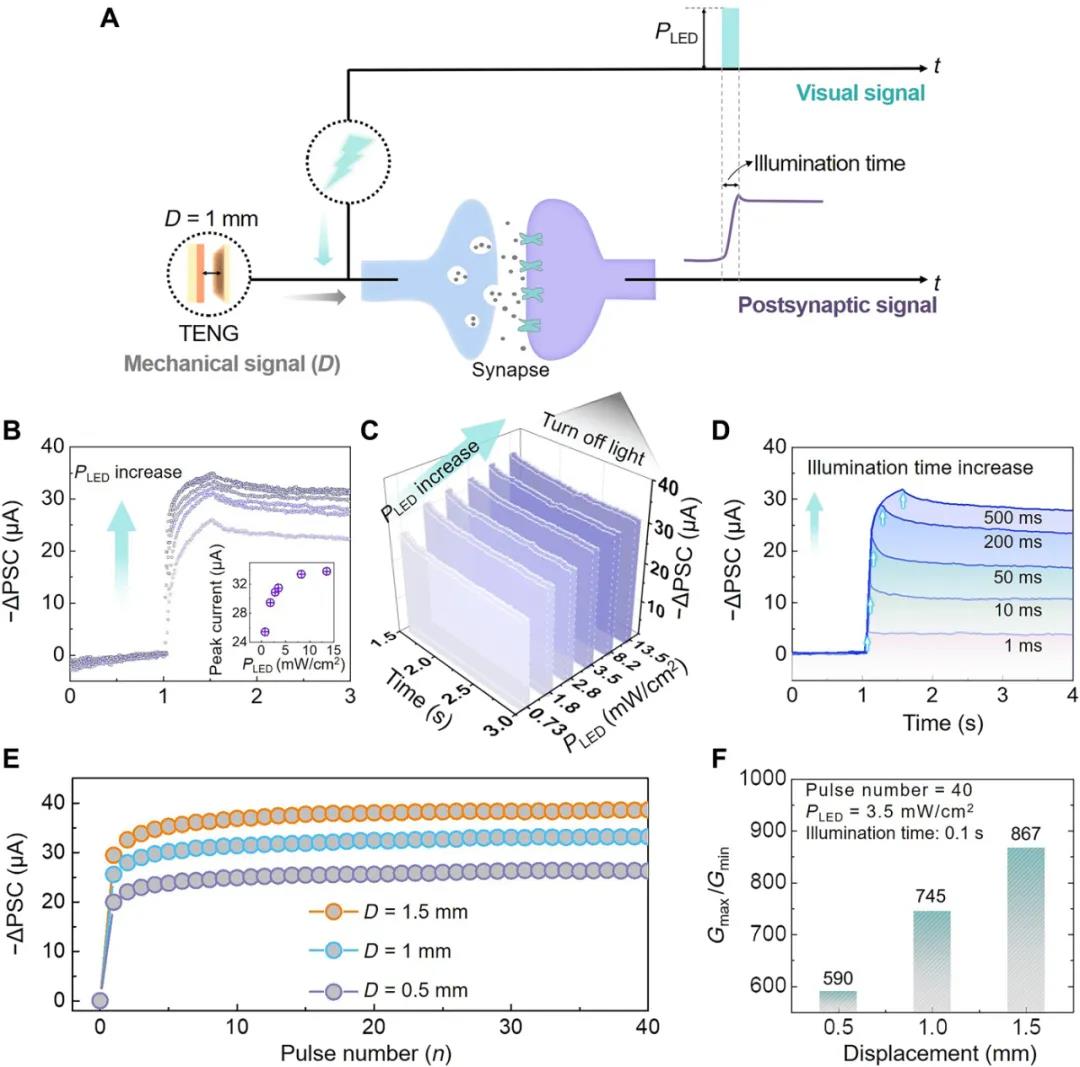 图4. 机械-光子人工突触机械信号和视觉信号的的协同作用:(A)原理示意图;(B-D) 人工突触对于光信号的响应行为;(E, F) 不同机械位移下的光脉冲增强可塑性
图4. 机械-光子人工突触机械信号和视觉信号的的协同作用:(A)原理示意图;(B-D) 人工突触对于光信号的响应行为;(E, F) 不同机械位移下的光脉冲增强可塑性
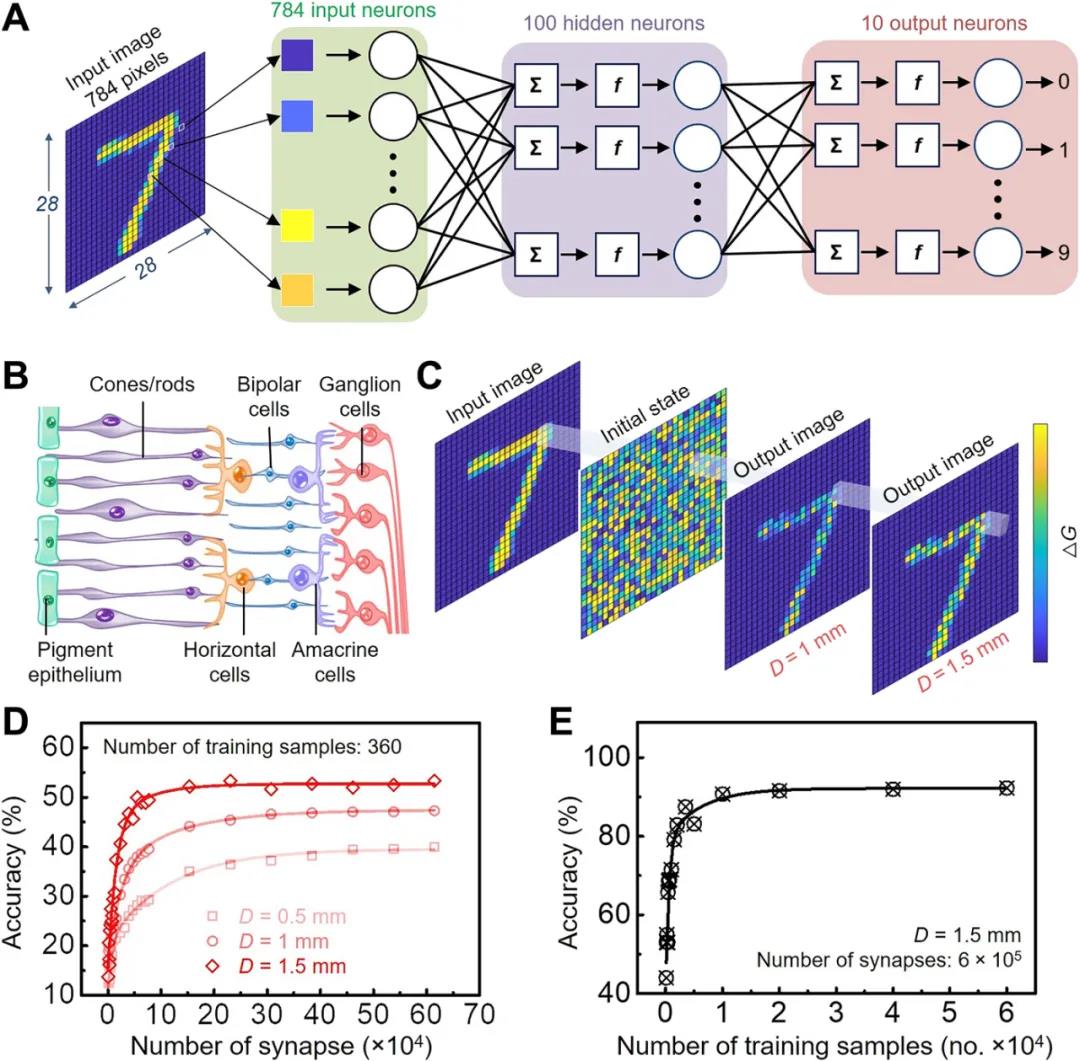
图5. 基于机械-光子人工突触的仿真神经网络用于图像识别
作者成功证明了一种基于Gr/MoS2异质结构的具有协同多模可塑性的机械-光子人工突触。这类突触器件对于混合模态的神经形态芯片和非常规卷积神经网络在交互光机接口、人造视网膜、智能机器人等领域的应用具有巨大的前景。可编程的持久光电导和基于机械行为的调制/擦除/塑化在记忆神经形态计算各种感觉数据(如光学、光子、触觉、压力、位移等)方面具有很大的应用前景。然而,该突触器件对于光信号的响应仅为抑制型突触后电流(Δ<0),兴奋性突触后电流对于构建人造视觉系统也同样重要,未来可对器件结合进一步优化来实现。
【参考文献】
https://advances.sciencemag.org/content/7/12/eabd9117
|
版权所有 © 2019 北京北科新材科技有限公司
All rights reserved. 京ICP备16054715号-2 |
