已传文件:photo/1631586161.png
北科纳米可提供仿生刺激感觉和无线通信的热伪装MXene机器人皮肤(可定制)
具有动态光学伪装、环境感知和群体交流能力的头足类皮肤长期以来一直是开发具有令人难以置信的光电功能的软机器人的生物灵感来源。然而,在为具有无限自由度的软机器人设计具有高级功能集成的可拉伸且柔顺的机器人皮肤方面仍然存在挑战。
来自东华大学的学者开发了一种新兴的二维材料 Ti3C2Tx,并且采用 MXene 和界面工程策略来制造多功能的柔软的机器人皮肤。通过利用界面不稳定性,具有可重构微纹理的 MXene 机器人皮肤展示了可调节的红外发射(0.30-0.80),可为软机器人实现动态热伪装。受益于固有的塞贝克效应、裂纹传播行为以及高导电性,MXene 机器人皮肤与热/应变感知能力紧密结合,可用作无线通信的可变形天线。在没有安装额外电子设备的情况下,穿着保形 MXene 皮肤的软机器人根据热电反馈执行自适应热伪装,以响应环境温度变化。相关文章以“Thermal Camouflaging MXene Robotic Skin with Bio-Inspired Stimulus Sensation and Wireless Communication”标题发表在Advanced Functional Materials。
论文链接:https://doi.org/10.1002/adfm.202110534 
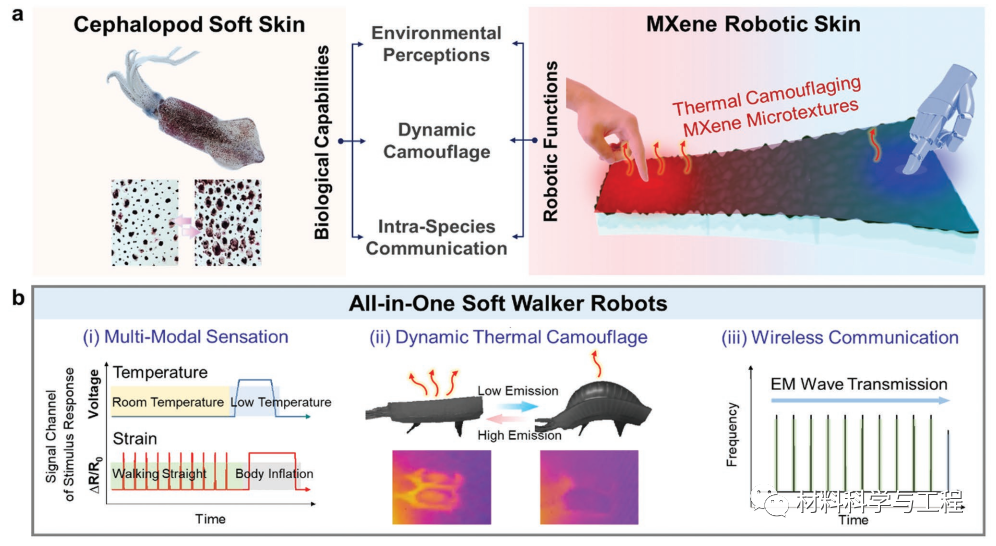
图1. 基于可重构 MXene 微纹理的多功能性的人造机器人皮肤示意图。a) 灵感来自头足类动物柔软皮肤的 MXene 机器人皮肤的设计理念。b) MXene 机器人皮肤具有高度可拉伸性,可用作 i) 可调节红外发射器,能够动态热伪装以隐藏具有高表面温度的软机器人,ii) 双功能压阻和热电传感器,用于监测可逆机器人驱动和环境实时温度变化,iii) 微波偶极子天线,能够进行远程机器人-机器人通信以发送/接收无线信号。
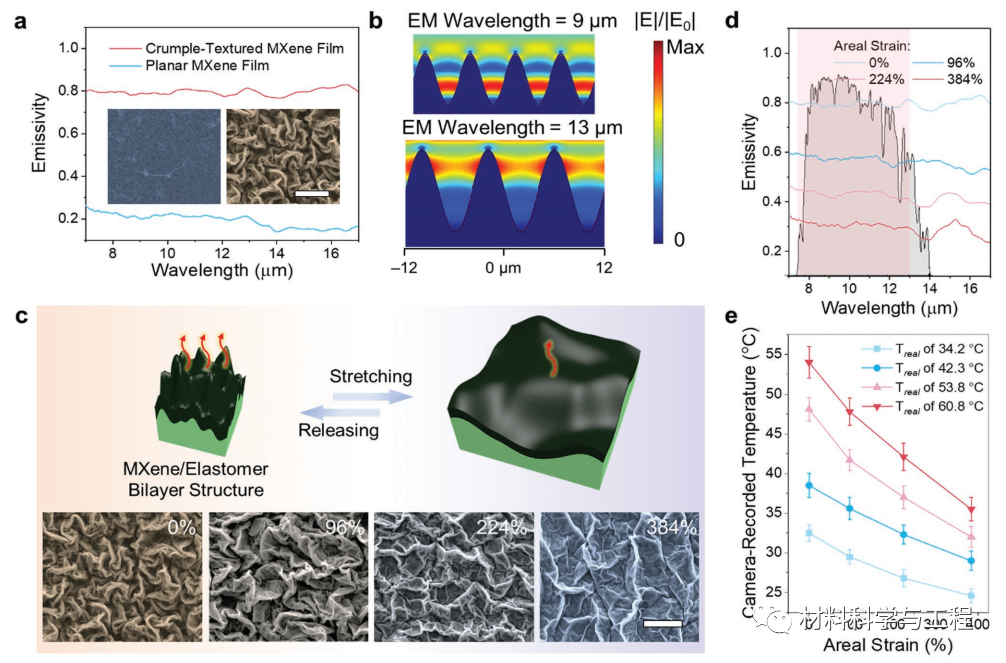
图2. 具有可调节红外发射的MXene 机器人皮肤,可用于动态热伪装。a) 褶皱纹理MXene 薄膜和平面 MXene 薄膜的红外发射(吸收)光谱。b) 两种简化的 MXene 模型(尺寸不同:一个为 5.4 × 3.2 μm,另一个为 8.0 × 5.0 μm,波长 × 幅度)在入射EM 波长下的模拟电场分布分别为9 μm(顶部)和 13 μm(底部)。c) MXene 机器人皮肤在增加的面积应变下的示意图(上)和 SEM 图像(下)。d) MXene 机器人皮肤在不同面积应变下的红外发射(吸收)光谱。e) 热像仪记录的温度下不同区域应变下的温度。
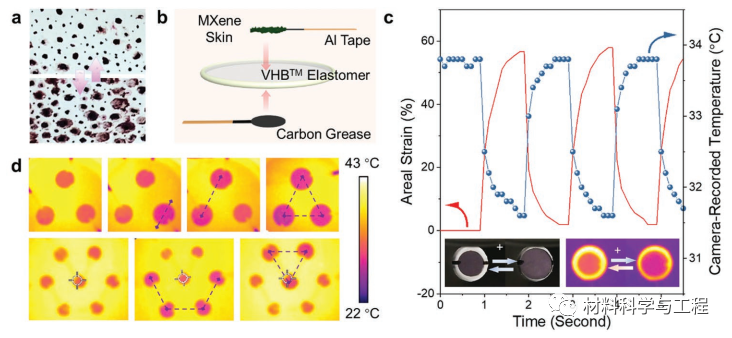
图3. 基于 MXene 涂层介电弹性体致动器 (DEA) 的受头足类动物启发的热伪装阵列。a) 头足类皮肤的数码照片,通过其色素细胞的可逆收缩(顶部)和扩张(底部)显示动态光学伪装。b) MXene 涂层 DEA 的示意图。c)圆形 MXene 涂层 DEA(直径 2 厘米)的面应变和温度变化。d) 两个具有三角形(顶部)和五边形(底部)图案的 MXene 涂层 DEA 阵列的红外热图像,显示出类似于头足类色素细胞的动态红外伪装。
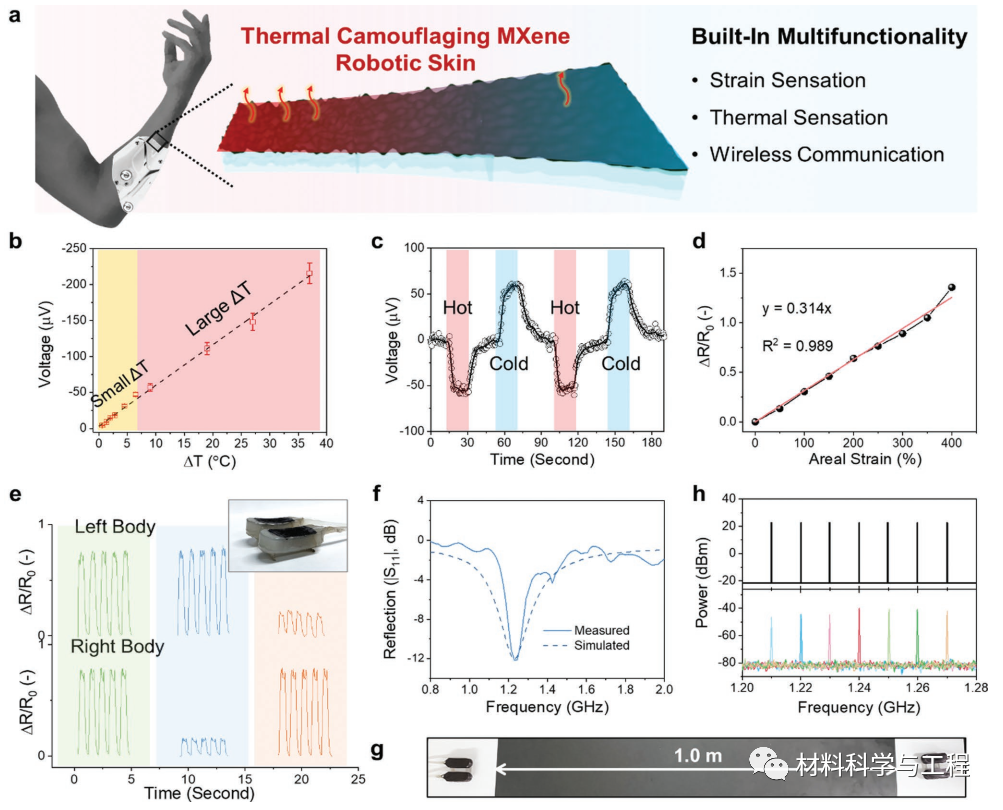
图4. 具有热感、应变感和无线通信的高级功能集成的热伪装 MXene 机器人皮肤。a) 穿着具有仿生多功能的 MXene 机器人皮肤的软机器示意图。b) MXene 机器人皮肤的输出热电电压作为温差 ( ΔT ) 的函数。c) MXene 机器人皮肤在冷( ΔT≈ -9 °C) 和热 ( ΔT≈ +9 °C )重复刺激下的热电电压变化。d) MXene 机器人皮肤在不同区域应变下的相对电阻变化。e) 软步行机器人在不同运动模式下佩戴两个 MXene 机器人皮肤的阻力变化。插图是软步行机器人的照片。
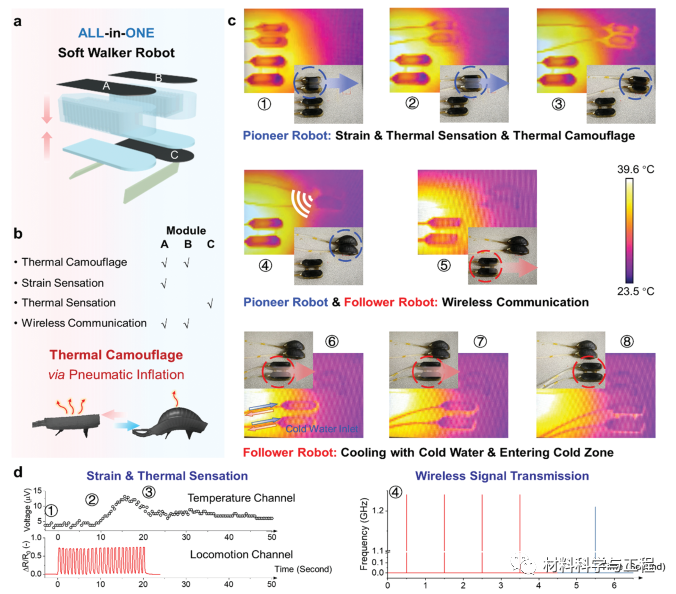
图5. “一体式”软机器人能够自适应热伪装,并且能实现仿生刺激感觉和无线机器人间通信。a) 在指定位置佩戴三个 MXene 机器人皮肤模块的软步行机器人示意图。b) 通过利用三个 MXene 皮肤模块执行机器人功能。c)两个软机器人的自适应热伪装及其相互通信。d) 在自适应热伪装过程中记录的应变/热感觉和无线通信信号。
总之,受头足类动物皮肤的启发,MXene机器人皮肤具有四个紧密集成的功能,这得益于它们的优势特性:1)可重构的皱褶状微纹理,2)有趣的红外光学特征(Δe ≈0.5),3 ) 高电导率 (≈2500 S m -1 ),和 4) 固有热电特性(塞贝克系数为 -5.88 μV K -1)。本文设想具有高级功能集成的 MXene 机器人皮肤可以应用于各种未来技术。
首先,由于其机械柔顺性和超薄特性,MXene 机器人皮肤可以集成到许多其他驱动系统(例如,液压、电动和磁力)中而不会影响它们的驱动行为,从而赋予各种软机器人类似的增强功能。其次,具有可调红外发射的可重构 MXene 微纹理可用于开发用于个人热管理的智能衣服和用于不可见信号传输的红外显示器。第三,考虑到简单的制造工艺和简单的设备配置,先进的打印技术可用于为 MXene 机器人皮肤配备复杂、更高分辨率的图案到微型机器人上。最后,同样重要的是通过整合片上机器学习,可以在现场处理应变和温度传感的双通道数据(无需将数据传输到数据中心),方便不受束缚的软机器人计划后续工作无需人为干预的动作。(文:SSC)


