
 mxene 学术专题
mxene 学术专题
【顶刊好文】|基于三维结构MXene-PEDOT:PSS/AgNWs电极的超低压驱动人工肌肉
QQ学术交流群:1092348845
详细介绍
基于三维结构MXene-PEDOTPSSAgNWs电极的超低压驱动人工肌肉.pdf
近日,东南大学刘磊教授课题组在国际知名期刊ACS Applied Materials & Interfaces上发表了题为“Ultralow-Voltage-Drivable Artificial Muscles Based on a 3D StructureMXene-PEDOT:PSS/AgNWs Electrode”的文章。该文章设计了基于MXene的三维结构电极,讨论了基于该电极的离子致动器驱动性能,介绍了离子致动器作为人工肌肉的生物应用。
研究速览
制造具有大弯曲位移和高响应灵敏度的离子致动器的主要挑战是设计具有良好电化学特性和导电性的柔性电极。本研究报告了由一维AgNWs和二维MXene组装形成具有三维网络层状结构的MXene-PEDOT:PSS/AgNWs电极,并且设计了一种基于该电极的离子致动器。结果表明,基于MXene-PEDOT:PSS/AgNWs电极的致动器表现出大弯曲应变(0.48%,0.5V正弦电压)、宽频率响应(0.1Hz-10 Hz)、5小时耐久性(91.9%初始值保持)和快速响应时间(≈5s)。这些优异性能来源于MXene和AgNWs形成的三维结构电极,从而创建了不受阻碍的离子通道,促进了离子的短时间扩散和快速注入,并提供了更高的电容和机械完整性。这种三维网络层状结构的电极为超低压驱动人工肌肉的发展提供了思路。
研究要点
研究要点1:
将一维AgNWs组装到二维MXene纳米片中形成了具有高性能的三维网络结构电极,并将其集成到致动器中与电解质膜有着很好的结合。AgNWs作为电极层中导电网络的框架,扩大了MXene纳米片的层间距离,为离子的进入提供了更大的空间。同时增加了电极的有效可及面积,进而改善了电化学性能和导电性。
研究要点2:
本文详细讨论了离子致动器的驱动机理,在超低输入电压下表现出优异的性能。在外加电场下,电解质膜中的阳离子和阴离子分别迁移到电极的阴极侧和阳极侧。由于阳离子尺寸比阴离子大,导致电极侧阳离子和阴离子的积累引起了相对体积的差异,所以致动器会向阳极侧弯曲变形。该离子致动器制备的抓手机器人可以抓取、提升、运输和释放一个自身数倍重量的物体;制备的仿生蝴蝶可以模拟蝴蝶的翅膀扇动,表明了致动器的软体机器人能力,具有很好的生物应用。
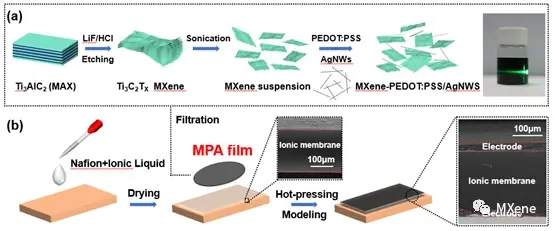
图1 MXene-PEDOT:PSS/AgNWs复合材料的合成以及离子致动器的制备示意图
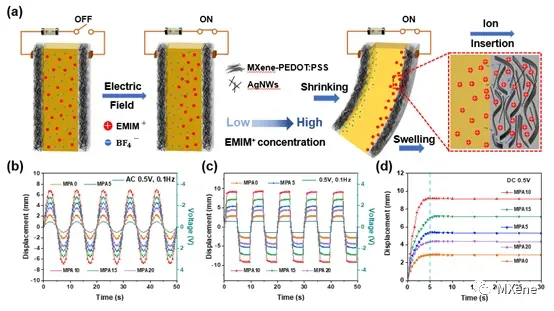
图2 (a)离子致动器的驱动机制;在(b)正弦电压(c)方波电压(d)直流电压输入条件下的弯曲位移。
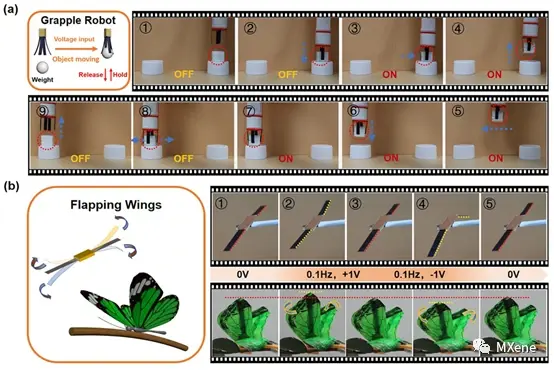
图3 离子致动器在(a)抓手机器人和(b)仿生蝴蝶上的应用
研究总结
基于MXene-PEDOT:PSS/AgNWs电极设计的离子致动器,用于开发一种在超低电压下的高性能人工肌肉。该电极通过构建三维网络结构,具有较大的离子可及表面积、较高的电荷存储能力以及较快的离子迁移速率。设计的抓手机器人和仿生蝴蝶的应用体现了其在仿生设备方面的巨大潜力。这项研究开辟了一种使用MXene设计三维结构电极的方法,该电极将在软体机器人和人工肌肉中显示出色的性能。
入群交流
围绕二维材料,北科纳米的“学术交流群”来了,扫描下方二维码加小编微信即可入群交流~


- 上一款: 重磅!中科院宁波材料所黄庆联手“Mxene之
- 下一款: 《Nature》| MXene重大突破:纳米