
 бЇЪѕЧАби
бЇЪѕЧАби
ЭѕжаСж/ЫяЦфО§РЯЪІдйЗЂScienceзгПЏЃКЛљгкЪЏФЋЯЉ/ЖўСђЛЏютвьжЪНсЙЙЕФЛњаЕ-ЙтзгШЫЙЄЭЛДЅ
QQбЇЪѕНЛСїШКЃК1092348845

ЯъЯИНщЩм
дкЭЛДЅЦїМўжаДЮађ/ЕўМгЖрФЃЬЌЕїжЦЪЧЪЕЯжИДдгЩёОааЮЊКЭЛюЖЏЕФЛљДЁжЎвЛЃЌЖјетШдШЛЪЧДЋЭГШЫЙЄЭЛДЅУцСйЕФжиДѓЬєеНЁЃдкШЫЙЄЭЛДЅжаёюКЯФІВСЕчЪЦЕїжЦКЭЙтзгУєЛЏПЩФмЛсЬсЙЉвЛжжжїЖЏЧвжБНгЕФЗНЪНРДРћгУЭЛДЅПЩЫмадКЭЪЕЯжЖрФЃЬЌЩёОаЮЬЌМЦЫуЁЃ
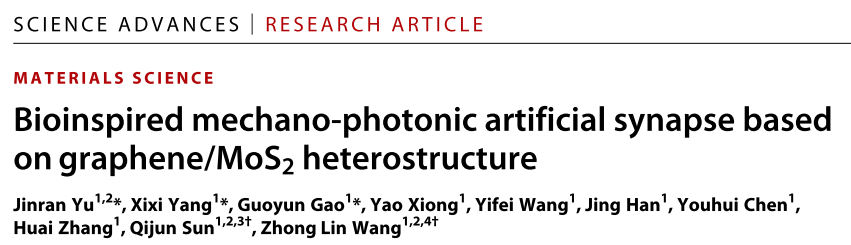
жаПЦдКФЩУзФмдДгыЯЕЭГЫљЕФЫяЦфО§КЭЭѕжаСжПЮЬтзщБЈЕРСЫвЛжжЛљгкЪЏФЋЯЉ/ЖўСђЛЏют(Gr/MoS2) вьжЪНсЙЙЕФЛњаЕ-ЙтзгШЫЙЄЭЛДЅЃЌОпгааЭЌЕФЛњаЕКЭЙтбЇПЩЫмадЃЈМДЛњаЕЮЛвЦИЈжњЙтЕчЭЛДЅПЩЫмадЃЉЁЃЭЛДЅЩшБИАќРЈЛљгкGr / MoS2вьжЪНсЙЙЕФЙтЕчОЇЬхЙмКЭДІгкНгДЅЗжРыФЃЪНЕФМЏГЩTENGЁЃTENGЮЛвЦВњЩњЕФФІВСЕчЪЦПЩгааЇЧ§ЖЏЭЛДЅОЇЬхЙмЁЃЭЈЙ§ПижЦGrКЭMoS2жЎМфЕФЕчКЩзЊвЦ/НЛЛЛЃЌФІВСЕчЪЦЛЙПЩвдКмШнвзЕиЕїНкЙтЕчЭЛДЅааЮЊЁЃдкЛњаЕЮЛвЦЃЈзїЮЊзДЬЌВЮЪ§ЃЉКЭАќКЌЪБПеаХЯЂЃЈШчЧПЖШКЭЙтееЪБМфЃЉЙтТіГхЕФаЭЌзїгУЯТЃЌбаОПСЫАќРЈГЄЦкМЧвфКЭЩёОвзЛЏдкФкЕФЙтзгЭЛДЅПЩЫмадЁЃдкЛњаЕЙтзгШЫЙЄЭЛДЅжавВШнвзЪЕЯжЙтзгБрГЬКЭЛњаЕВСГ§Й§ГЬЁЃГ§СЫЖдЭЛДЅЙІФмНјааЩшБИМЖЗТецжЎЭтЃЌЛЙНјвЛВНЙЙНЈСЫШЫЙЄЩёОЭјТчЃЈANNЃЉЃЌвджЄУїНшжњЛњаЕдіЫмзїгУИФНјЭМЯёЪЖБ№ЕФПЩааадЁЃ
ЭМ1. ЩњЮяДЅОѕ/ЪгОѕЩёОКЭЛњаЕ-ЙтзгШЫЙЄЭЛДЅЃК(A) ЩњЮяДЅОѕ/ЪгОѕИажЊЯЕЭГЪОвтЭМЃЛ(B) ЦїМўЪОвтЭМЁЃ
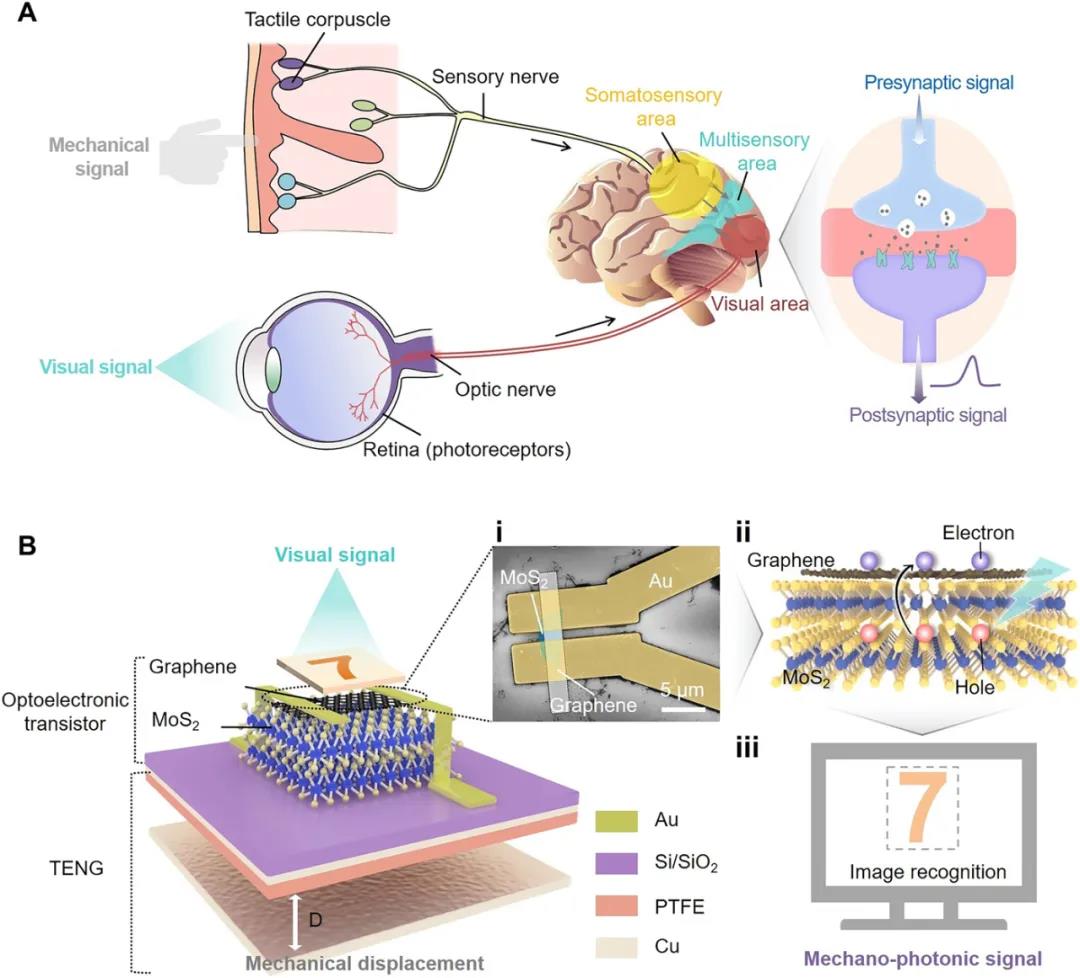
ЭМ2. ЛљгкGr/MoS2вьжЪНсЙЙЕФЛњаЕ-ЙтЕчОЇЬхЙмМАЦфЙЄзїЛњжЦЃК(A) TENGЪфГіЕчбЙКЭЮЛвЦЕФЙиЯЕЃЛ(B)ДЋЪфЧњЯпЃЛ(C) ЙЄзїЛњжЦ
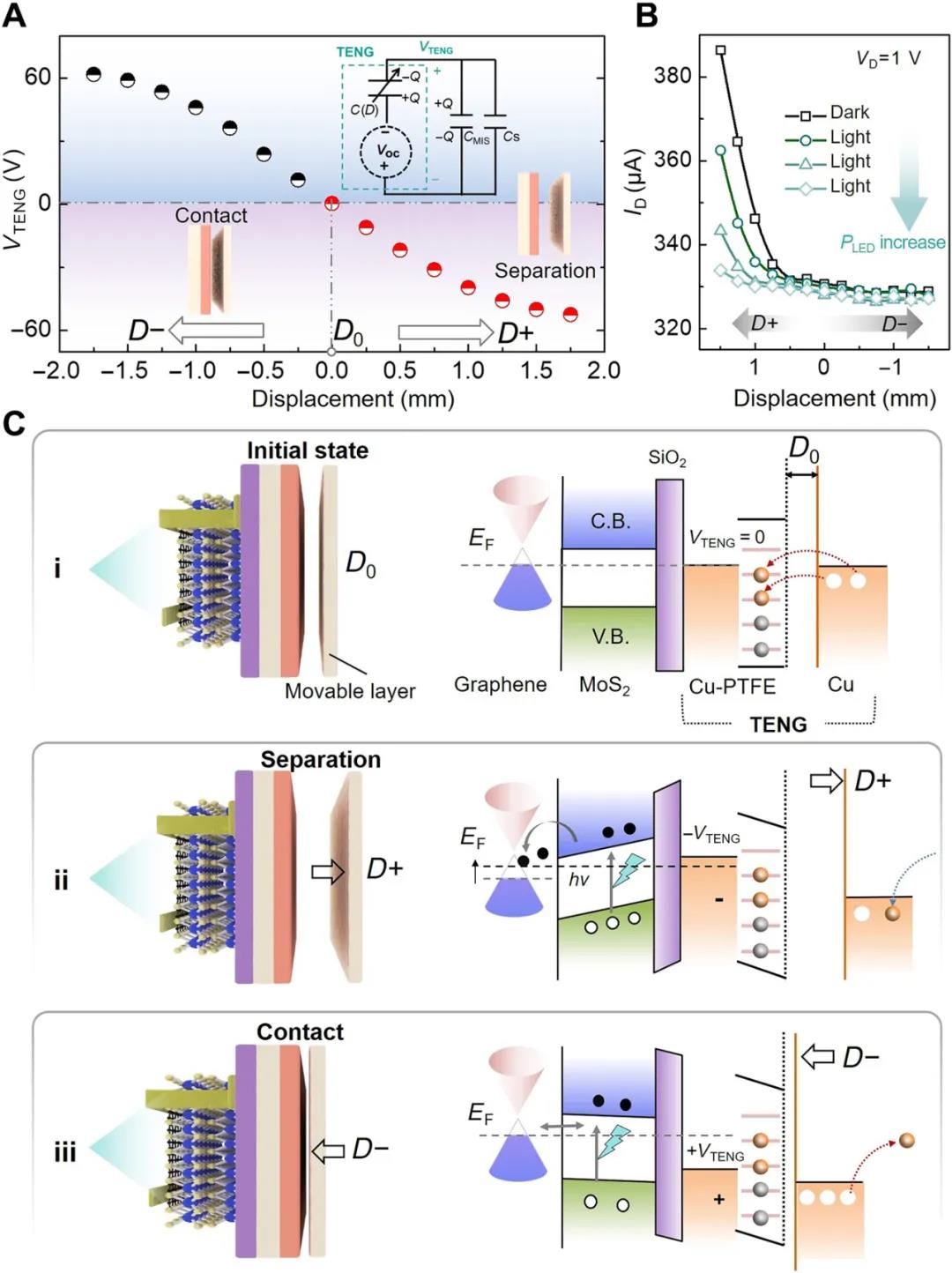
 ЭМ3. ЛљгкGr/MoS2вьжЪНсЙЙЕФЛњаЕ-ЙтзгШЫЙЄЭЛДЅЃК(A) дкКкАЕЯТЕФЪЕЪБЭЛДЅКѓЕчСїЃЛ(B) ЙтМЄЛюЭЛДЅКѓЕчСїЃЛ(C) дкЙтееКЭВЛЭЌЮЛвЦаЭЌзїгУЯТЕФЭЛДЅКѓЕчСїБфЛЏЃЛ(D) вьжЪНсЙЙЕФЬЌУмЖШКЭдиСїзгЗжВМ
ЭМ3. ЛљгкGr/MoS2вьжЪНсЙЙЕФЛњаЕ-ЙтзгШЫЙЄЭЛДЅЃК(A) дкКкАЕЯТЕФЪЕЪБЭЛДЅКѓЕчСїЃЛ(B) ЙтМЄЛюЭЛДЅКѓЕчСїЃЛ(C) дкЙтееКЭВЛЭЌЮЛвЦаЭЌзїгУЯТЕФЭЛДЅКѓЕчСїБфЛЏЃЛ(D) вьжЪНсЙЙЕФЬЌУмЖШКЭдиСїзгЗжВМ
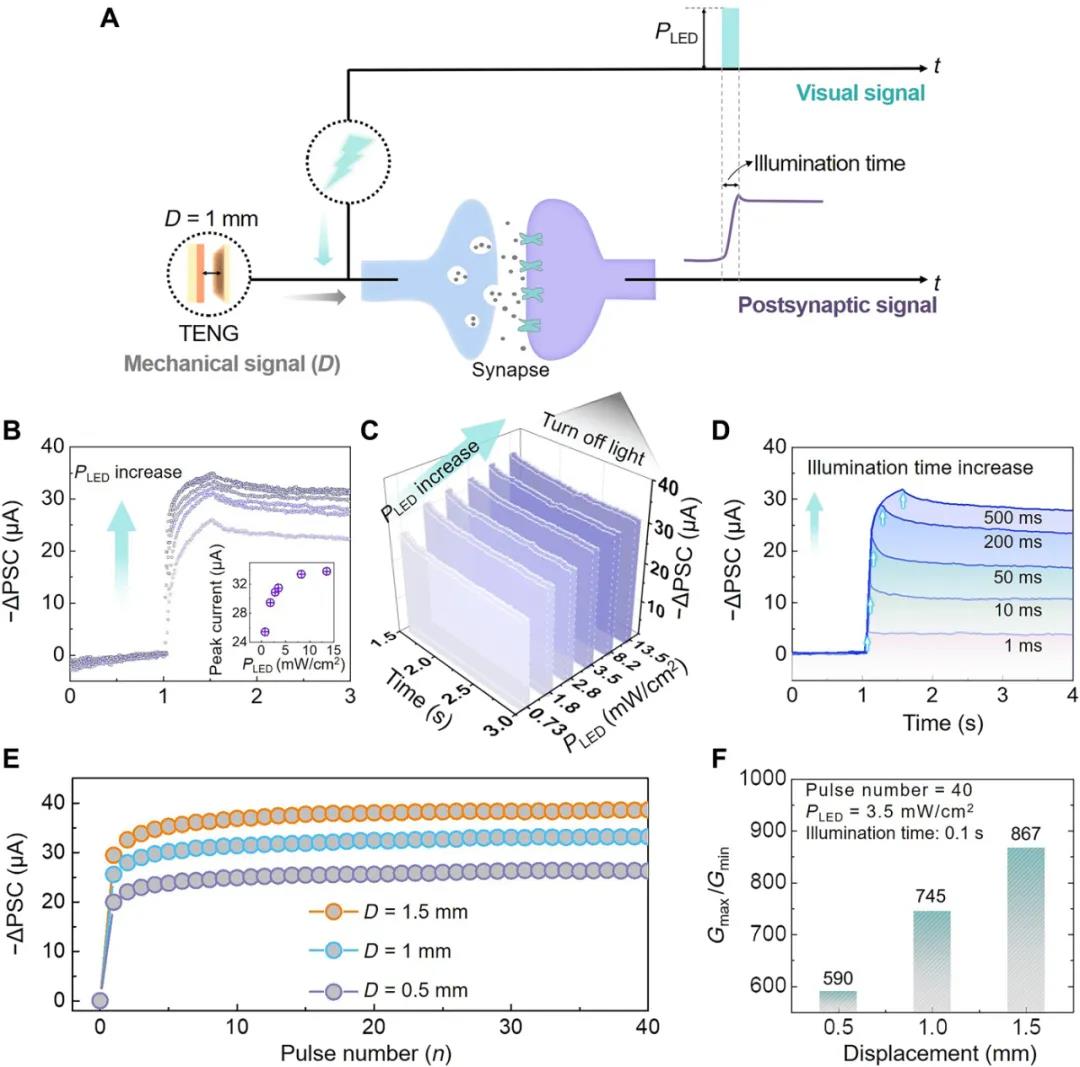 ЭМ4. ЛњаЕ-ЙтзгШЫЙЄЭЛДЅЛњаЕаХКХКЭЪгОѕаХКХЕФЕФаЭЌзїгУЃК(A)дРэЪОвтЭМЃЛ(B-D) ШЫЙЄЭЛДЅЖдгкЙтаХКХЕФЯьгІааЮЊЃЛ(E, F) ВЛЭЌЛњаЕЮЛвЦЯТЕФЙтТіГхдіЧППЩЫмад
ЭМ4. ЛњаЕ-ЙтзгШЫЙЄЭЛДЅЛњаЕаХКХКЭЪгОѕаХКХЕФЕФаЭЌзїгУЃК(A)дРэЪОвтЭМЃЛ(B-D) ШЫЙЄЭЛДЅЖдгкЙтаХКХЕФЯьгІааЮЊЃЛ(E, F) ВЛЭЌЛњаЕЮЛвЦЯТЕФЙтТіГхдіЧППЩЫмад
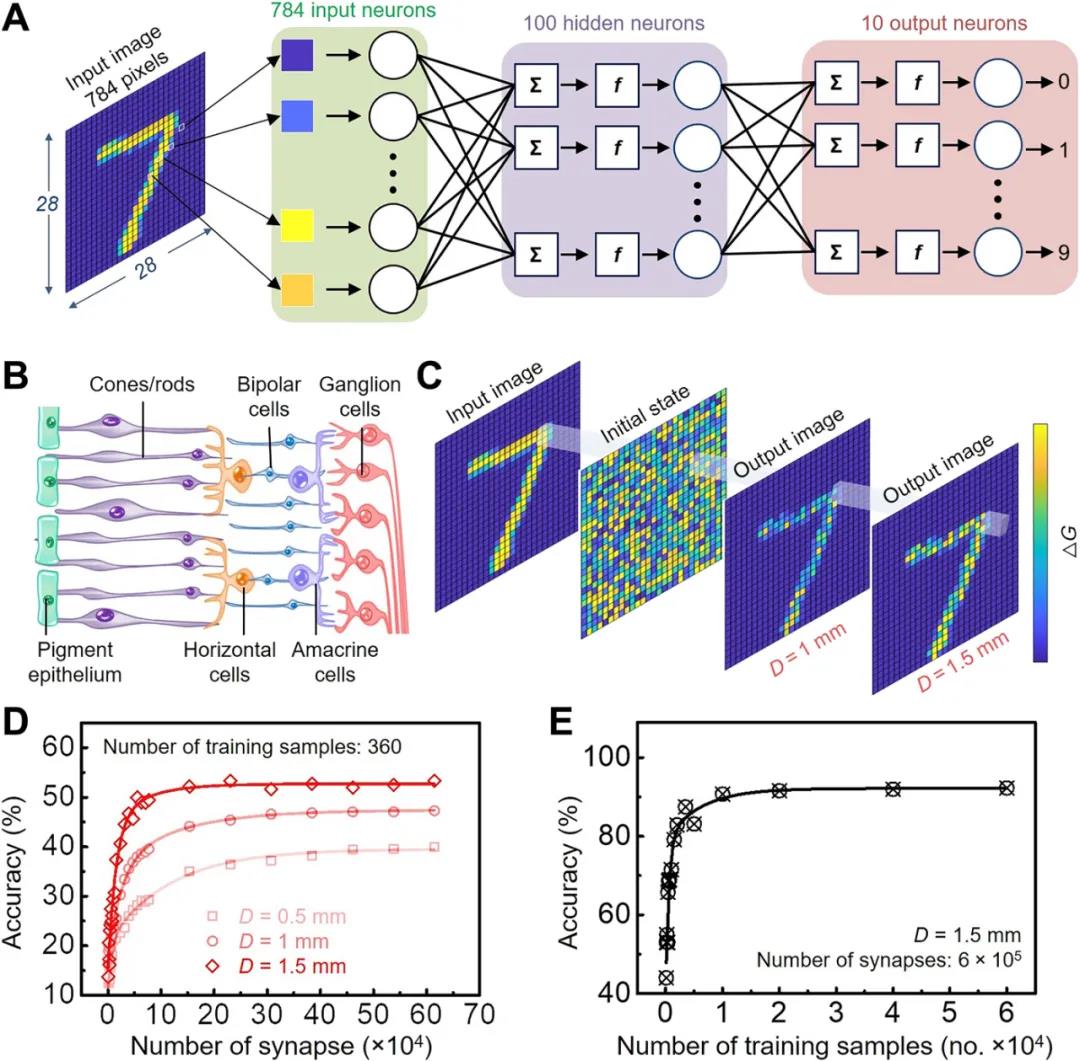
ЭМ5. ЛљгкЛњаЕ-ЙтзгШЫЙЄЭЛДЅЕФЗТецЩёОЭјТчгУгкЭМЯёЪЖБ№
зїепГЩЙІжЄУїСЫвЛжжЛљгкGr/MoS2вьжЪНсЙЙЕФОпгааЭЌЖрФЃПЩЫмадЕФЛњаЕ-ЙтзгШЫЙЄЭЛДЅЁЃетРрЭЛДЅЦїМўЖдгкЛьКЯФЃЬЌЕФЩёОаЮЬЌаОЦЌКЭЗЧГЃЙцОэЛ§ЩёОЭјТчдкНЛЛЅЙтЛњНгПкЁЂШЫдьЪгЭјФЄЁЂжЧФмЛњЦїШЫЕШСьгђЕФгІгУОпгаОоДѓЕФЧАОАЁЃПЩБрГЬЕФГжОУЙтЕчЕМКЭЛљгкЛњаЕааЮЊЕФЕїжЦ/ВСГ§/ЫмЛЏдкМЧвфЩёОаЮЬЌМЦЫуИїжжИаОѕЪ§Он(ШчЙтбЇЁЂЙтзгЁЂДЅОѕЁЂбЙСІЁЂЮЛвЦЕШ)ЗНУцОпгаКмДѓЕФгІгУЧАОАЁЃШЛЖјЃЌИУЭЛДЅЦїМўЖдгкЙтаХКХЕФЯьгІНіЮЊвжжЦаЭЭЛДЅКѓЕчСїЃЈІЄ<0ЃЉЃЌаЫЗмадЭЛДЅКѓЕчСїЖдгкЙЙНЈШЫдьЪгОѕЯЕЭГвВЭЌбљживЊЃЌЮДРДПЩЖдЦїМўНсКЯНјвЛВНгХЛЏРДЪЕЯжЁЃ
ЁОВЮПМЮФЯзЁП
https://advances.sciencemag.org/content/7/12/eabd9117
- ЩЯвЛПюЃК ГЄДКгІЛЏЫљЧњЯўИеAngewЃК DNAzyme
- ЯТвЛПюЃК ШНШНЩ§Ц№ЕФ 2D жЎаЧЃКаТгБЕФ MBenes